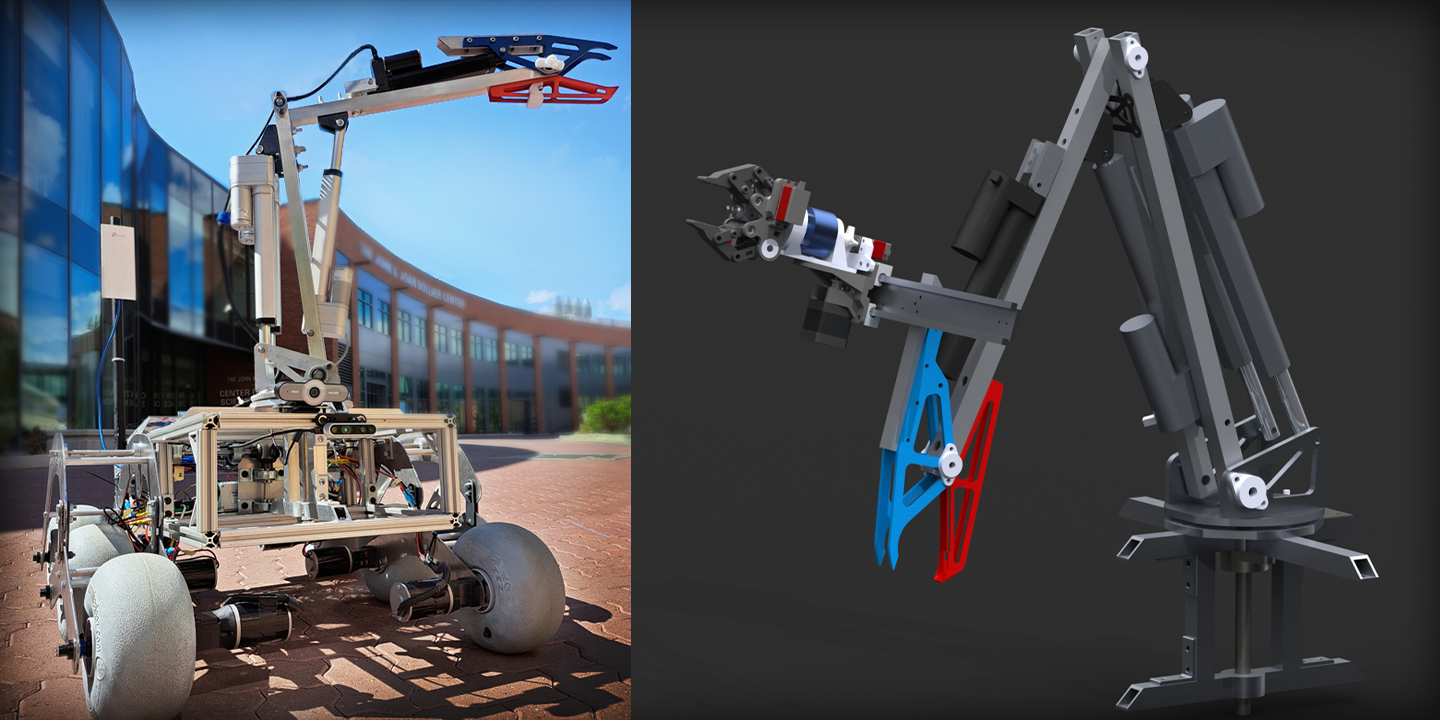
Capstone Project Robotic Arm
Project Team Lead for manipulator arm built for GU Robotics’ rover. Oversaw design from initial conception to final integration and testing. Responsible for analysis, design, part sourcing, and manufacturing.

GU Robotics Semi-Autonomous Rover
Mechanical Team Lead responsible for conducting design reviews, teaching underclassmen SolidWorks, and POC to Gonzaga’s machine shop. Helped establish the rover project for club to participate in the URC Competition.
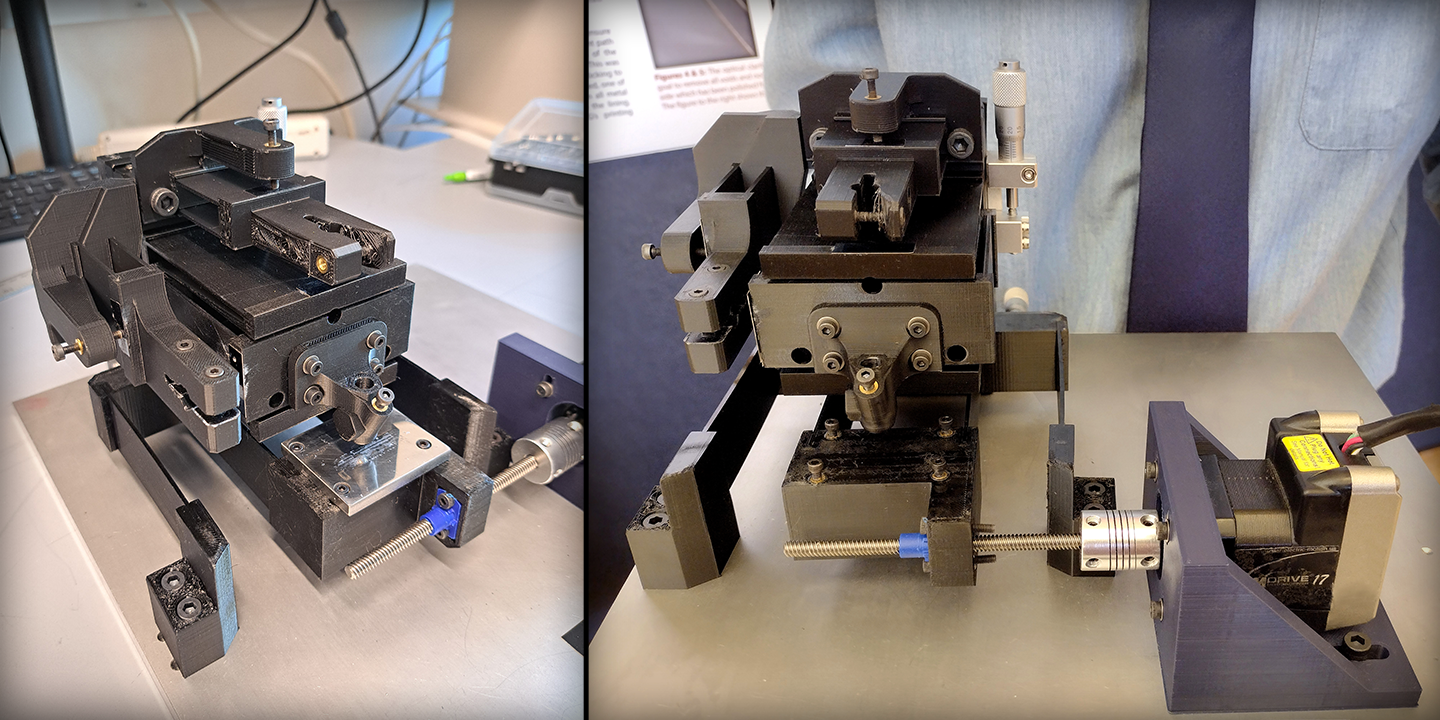
High Sensitivity Tribometer
Designed and manufactured a high sensitivity tribometer. This will be used to test the friction of PTFE composite transfer films and biomaterials such as hydrogels.
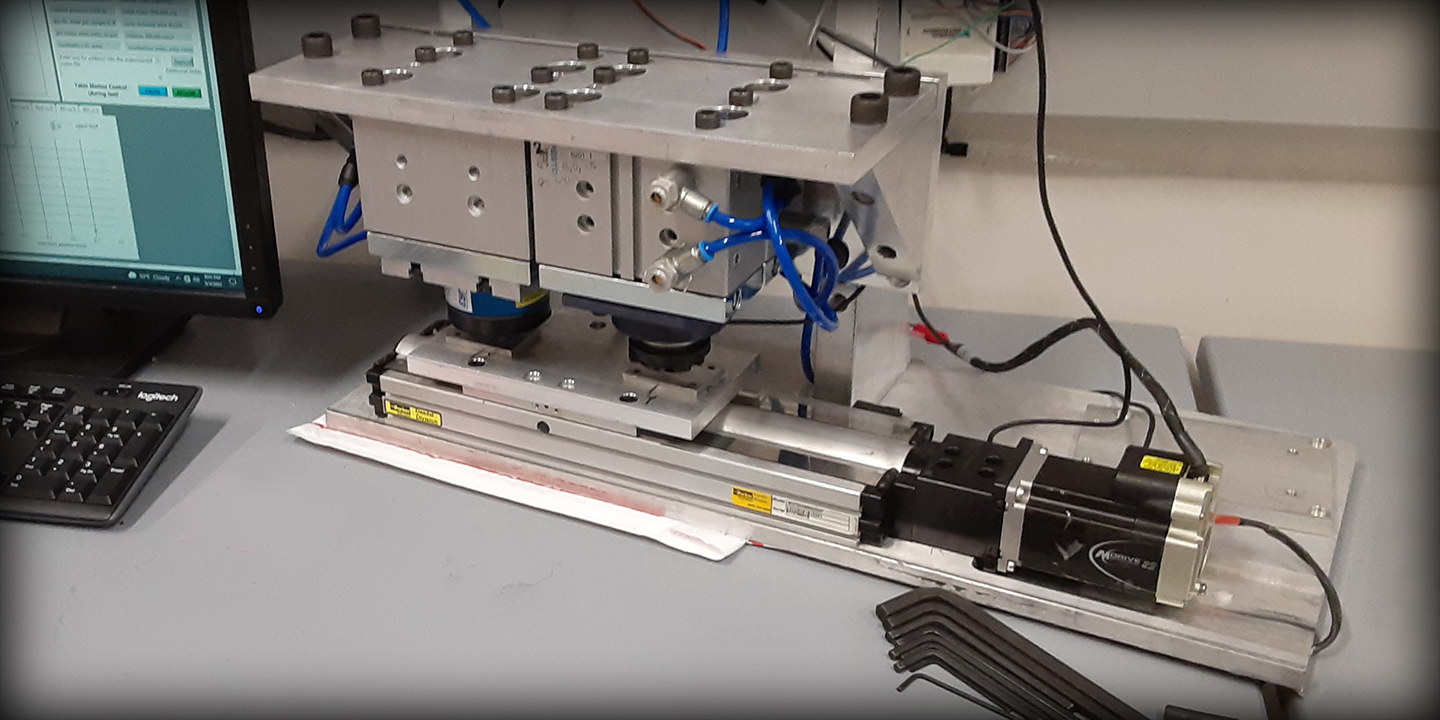
Research Laboratory Tribometer Retrofit
Produced drawings in SolidWorks and milled parts to retrofit existing lab tribometer for improved measurement accuracy.
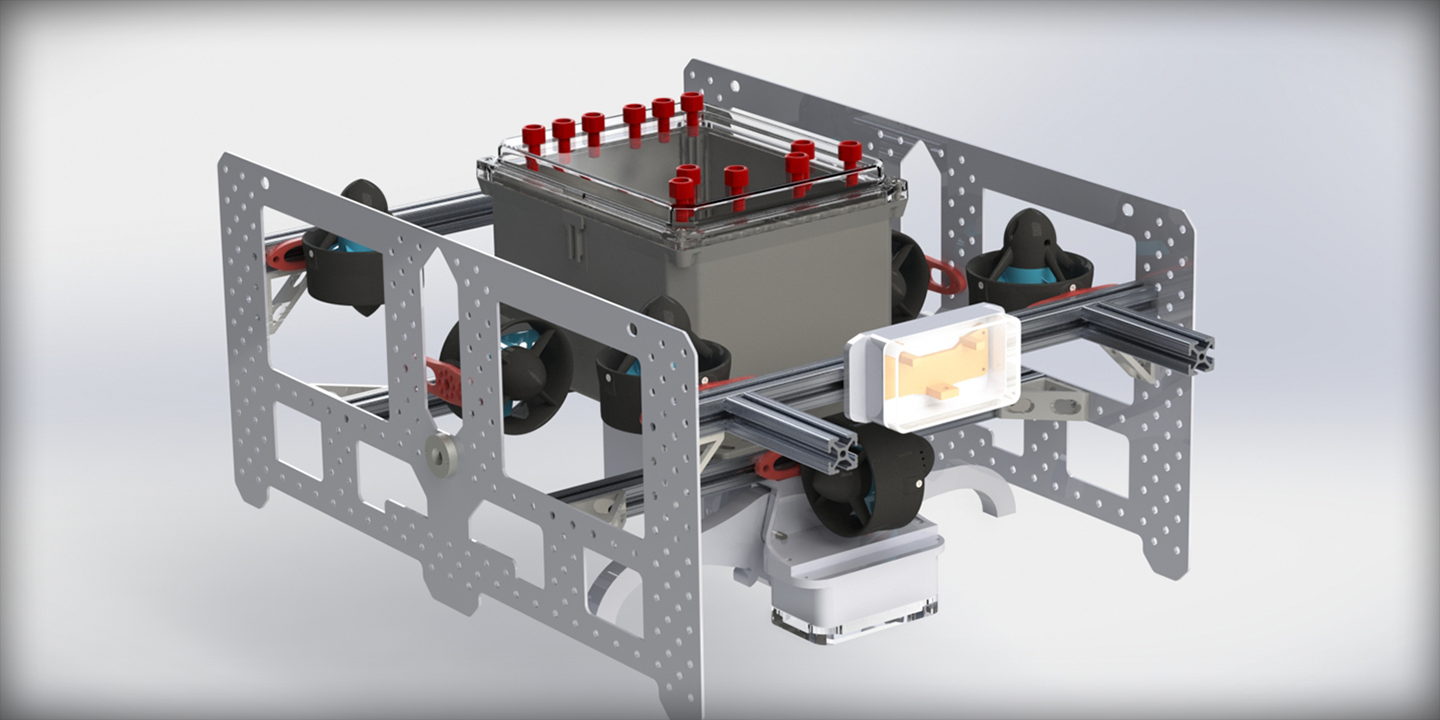
GU Robotics Autonomous Submarine
Team Lead for autonomous submarine’s waterproof manipulator arm and camera systems. Worked with the 6-axis motor control team to improve autonomous maneuverability.
Gonzaga Hackathon Robotic Arm
Contributed to mechanical design of 3-axis robotic arm capable of running inverse kinematics. Design won 1st Place in the 2021 Gonzaga Hackathon Competition.
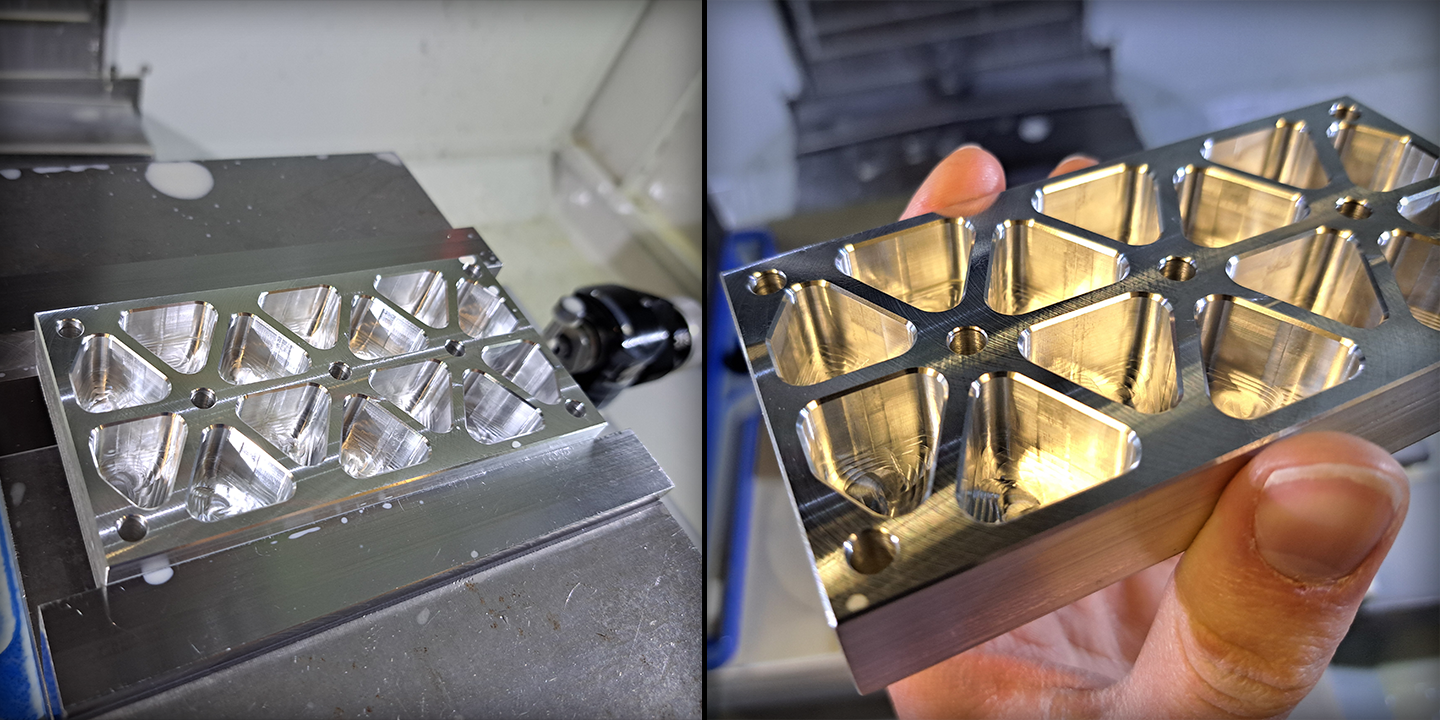
Isogrid CNC Pocket Project
Designed a basic isogrid part to learn pocketing with small endmills and CNC chamfering. Milled part on a Haas VF-2SSYT and programmed toolpaths in SolidCAM.

Action Camera Mount for Music Lyre
Designed a GoPro camera mount that securely attaches to instrument lyre. U.S. Patent 62935098, filed Nov 2019. Provisional Patent.
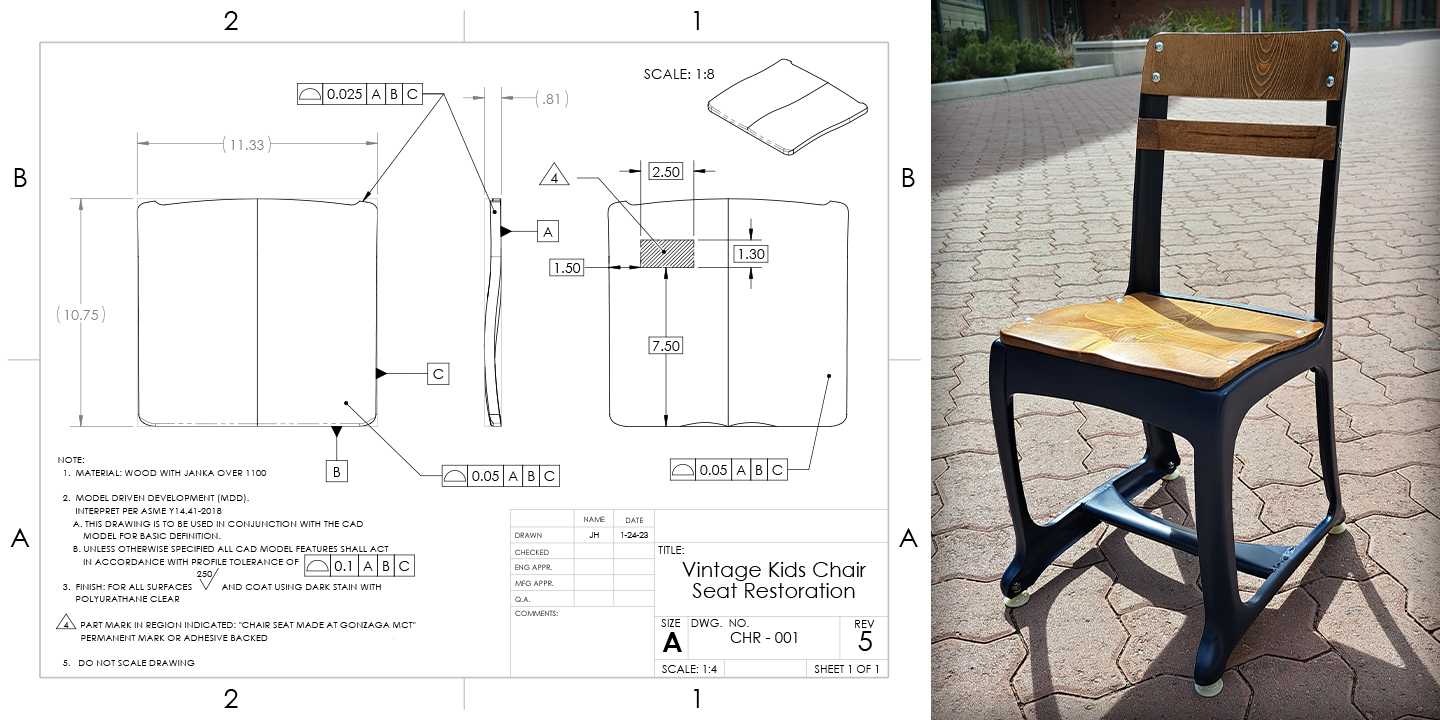
Vintage Chair Restoration
Learned surface modeling design for manufacturing and how to define part drawings per ASME Y14.41–2019. The parts were cut on a CNC router then sanded and varnished.
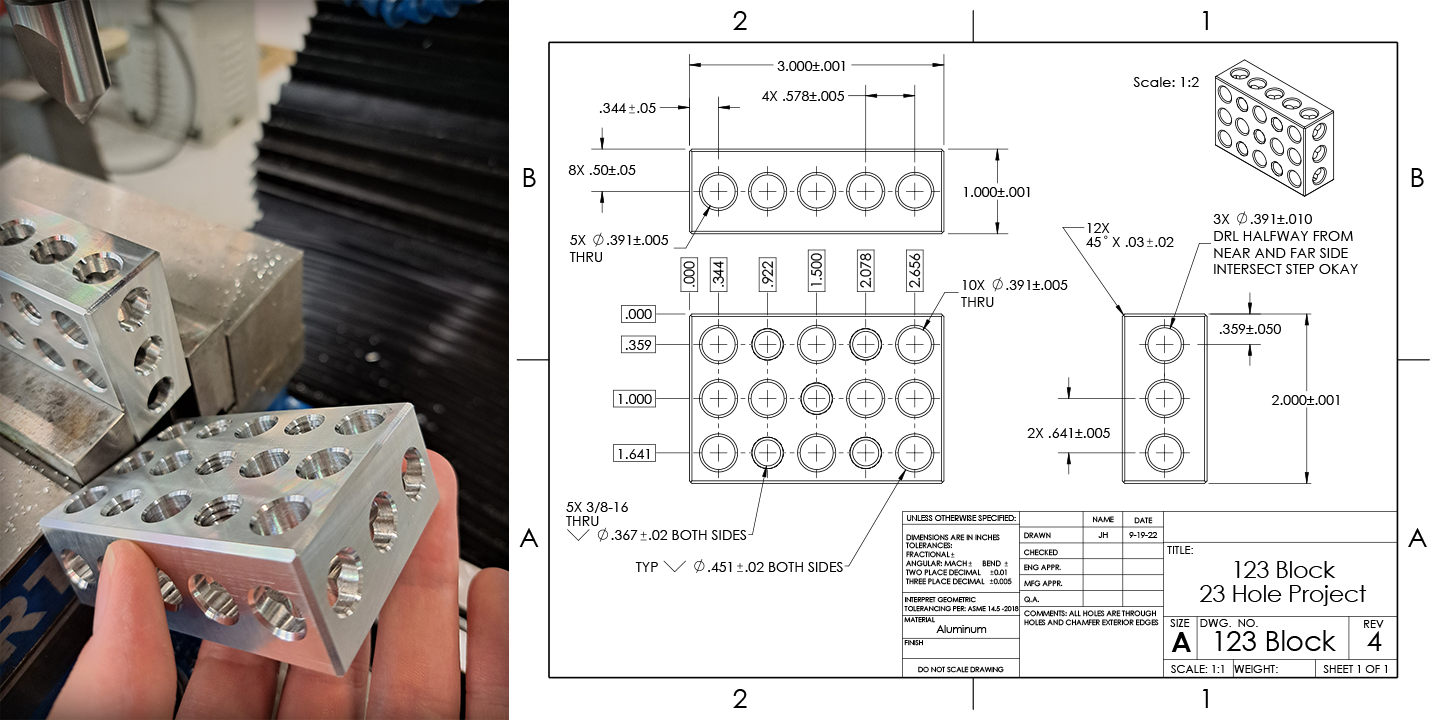
123 Block Milling Project
Manufactured a pair of aluminum 123 blocks to tight tolerances. Learned how to use shell mills, maintain part perpendicularity, and created ASME Y14.5 part drawings.

Carbon Fiber Truss Segment
Worked with Gonzaga’s Material Advantage Club to make a wide flanged truss segment using prepreg carbon fiber. Learned about the vacuum bagging and curing process.
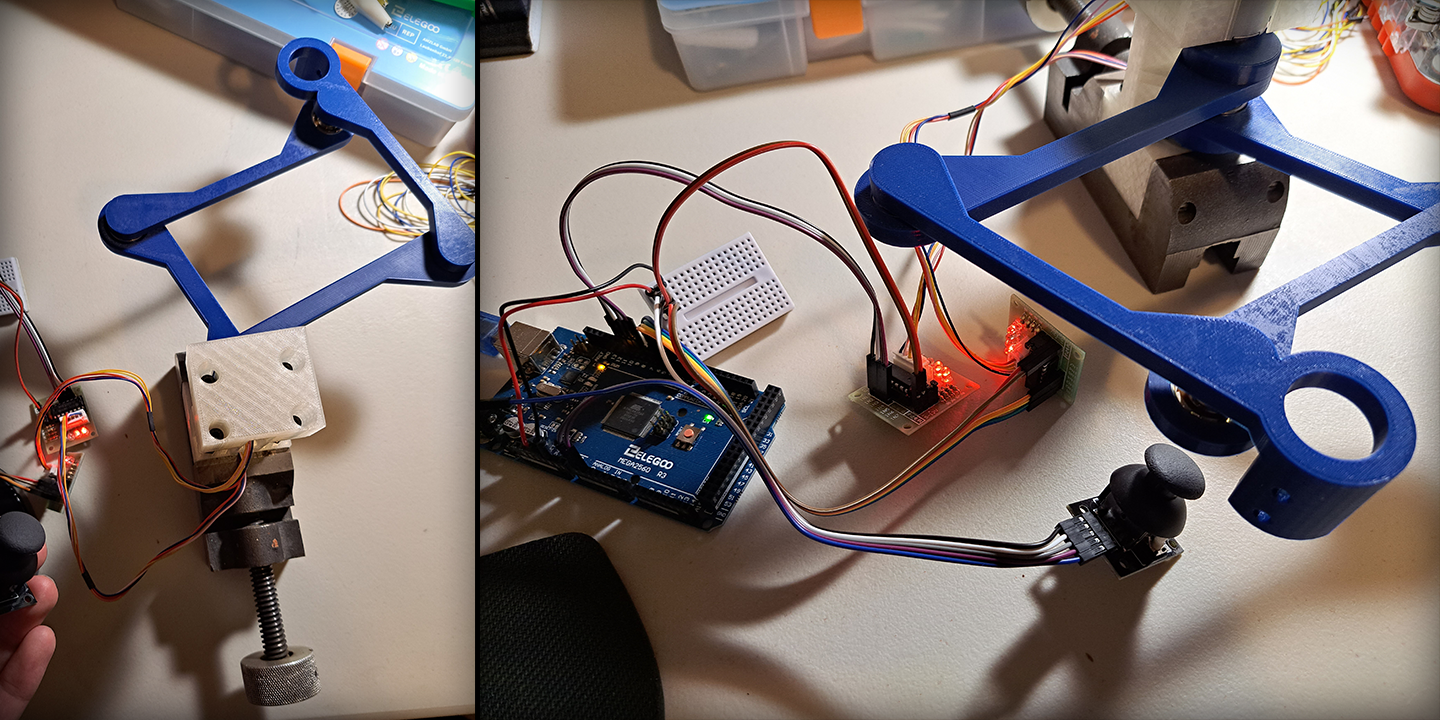
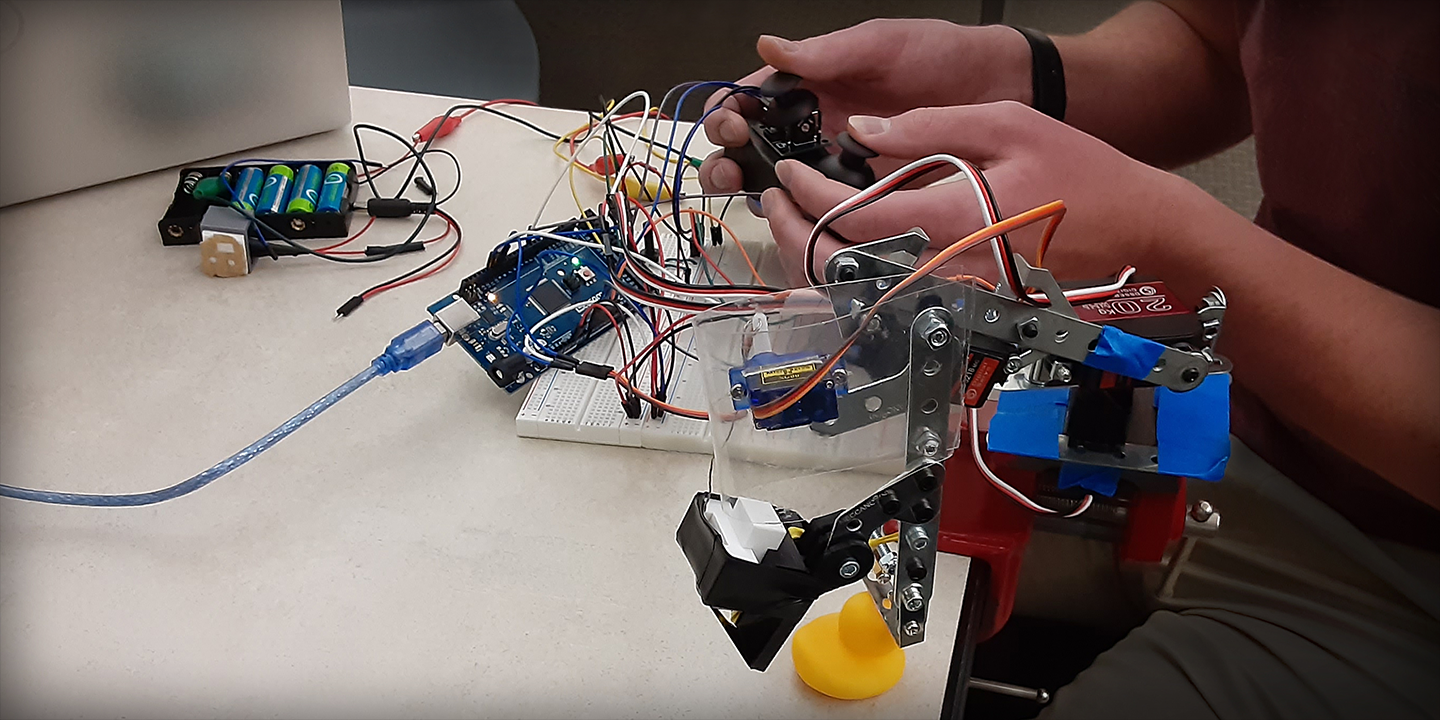
Five Bar Parallel Robot
Designed, built, and programed a five-bar parallel drawing robot with a coaxial drive. This project utilized Arduino, inverse kinematics, and stepper motors to position the end effector.

Piston Assembly
Class project to model a diesel engine in CAD. Learned about reverse engineering, part assemblies and Geometric Dimensioning, and Tolerancing (GD&T).
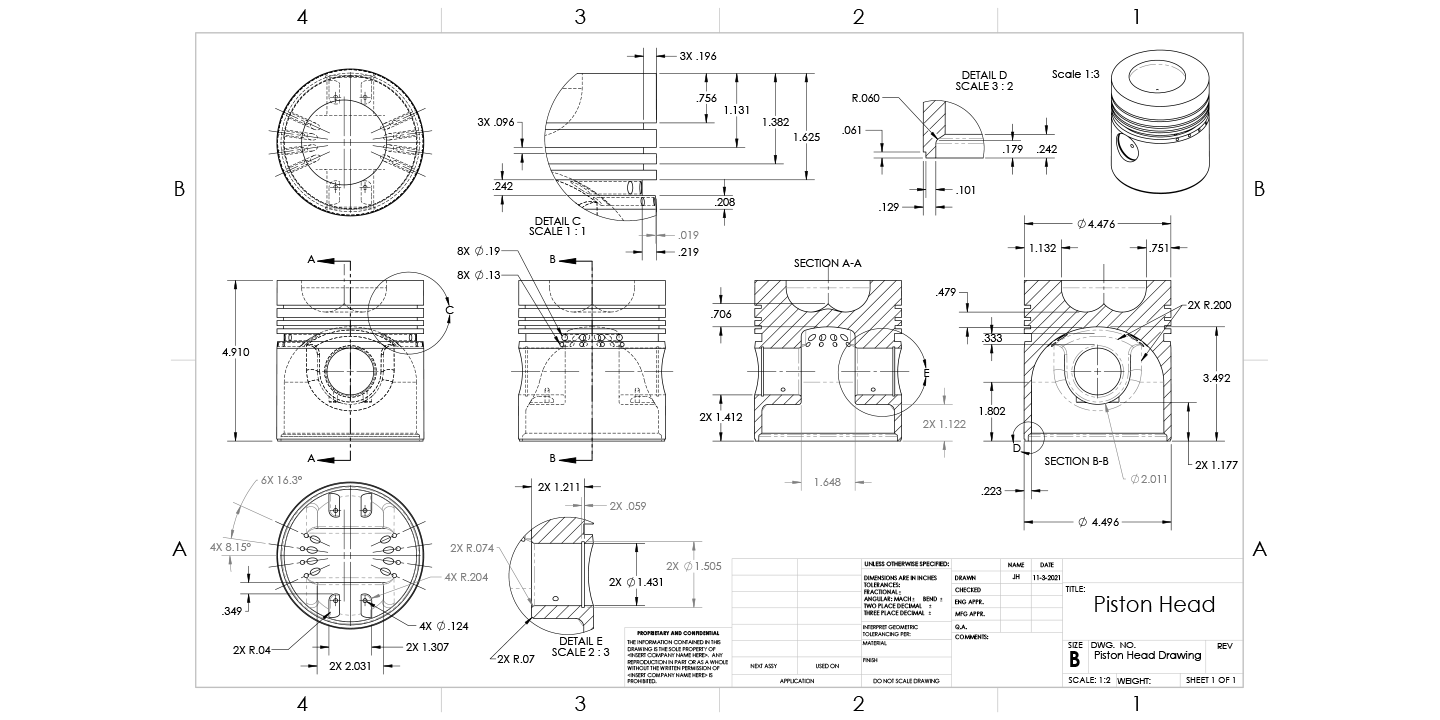
Piston Head Part Drawing
Class project to create part drawings that communicate the piston design effectively.
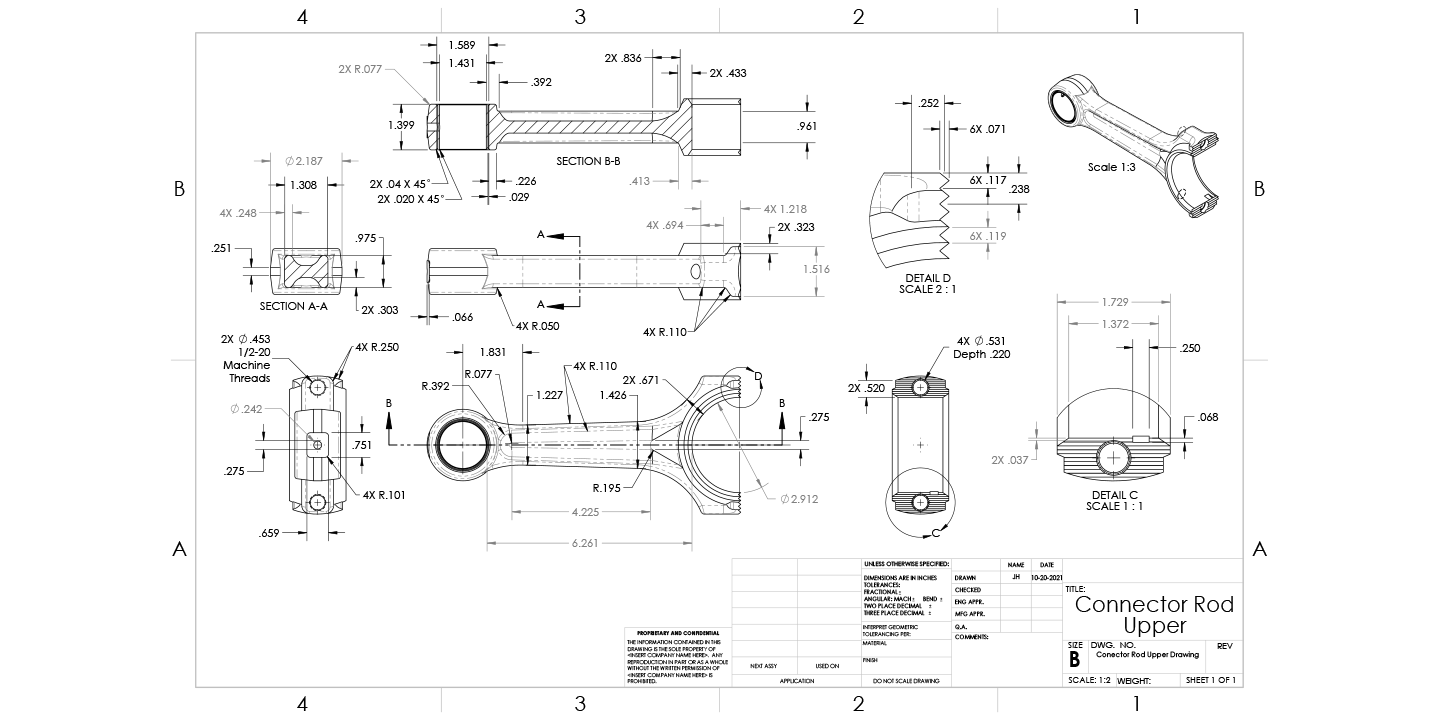
Connecting Rod Part Drawing
Class project to create effective part drawings, learn about cosmetic threads, limits, and fits.
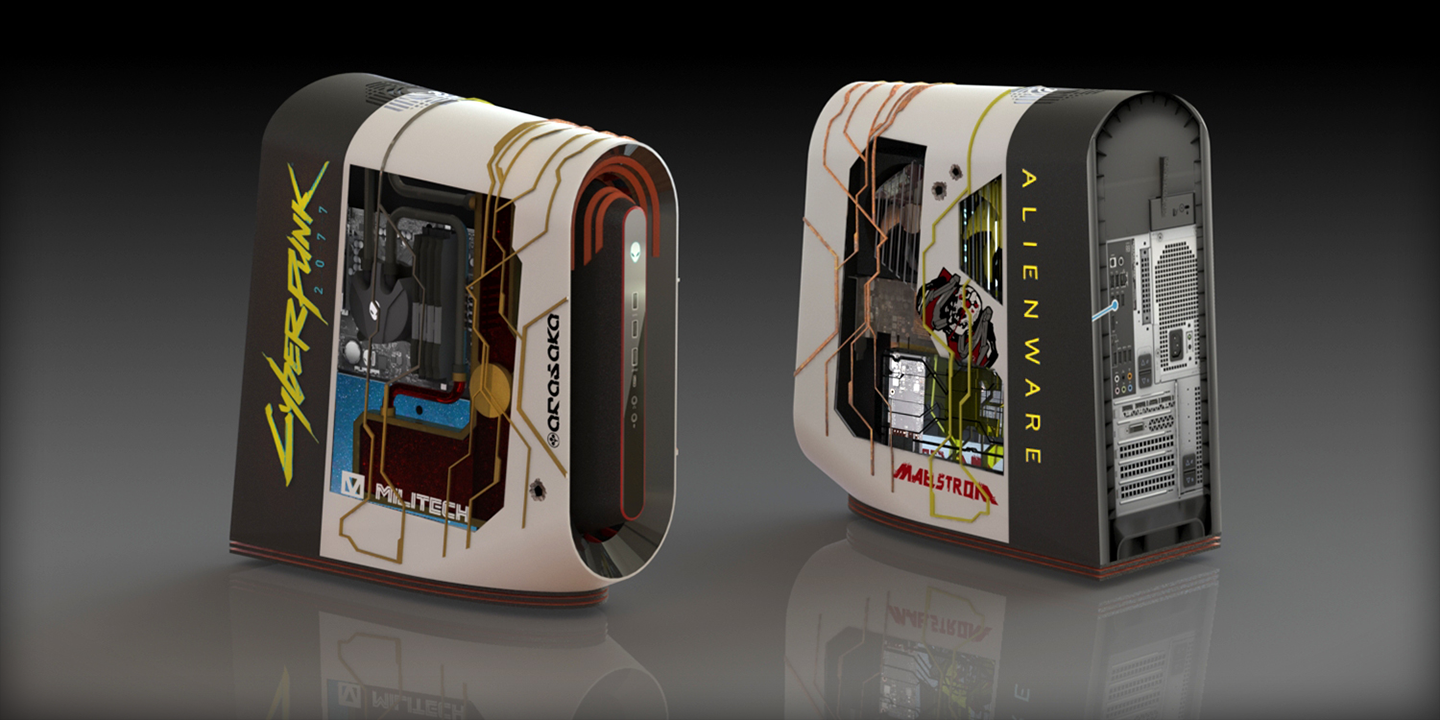
Cyberpunk 2077 Computer Case Mod
3D Design entry into Alienware’s and CD Projekt RED’s #CyberUpYourPc case modding contest. Design based on Alienware Aurora computer chassis.
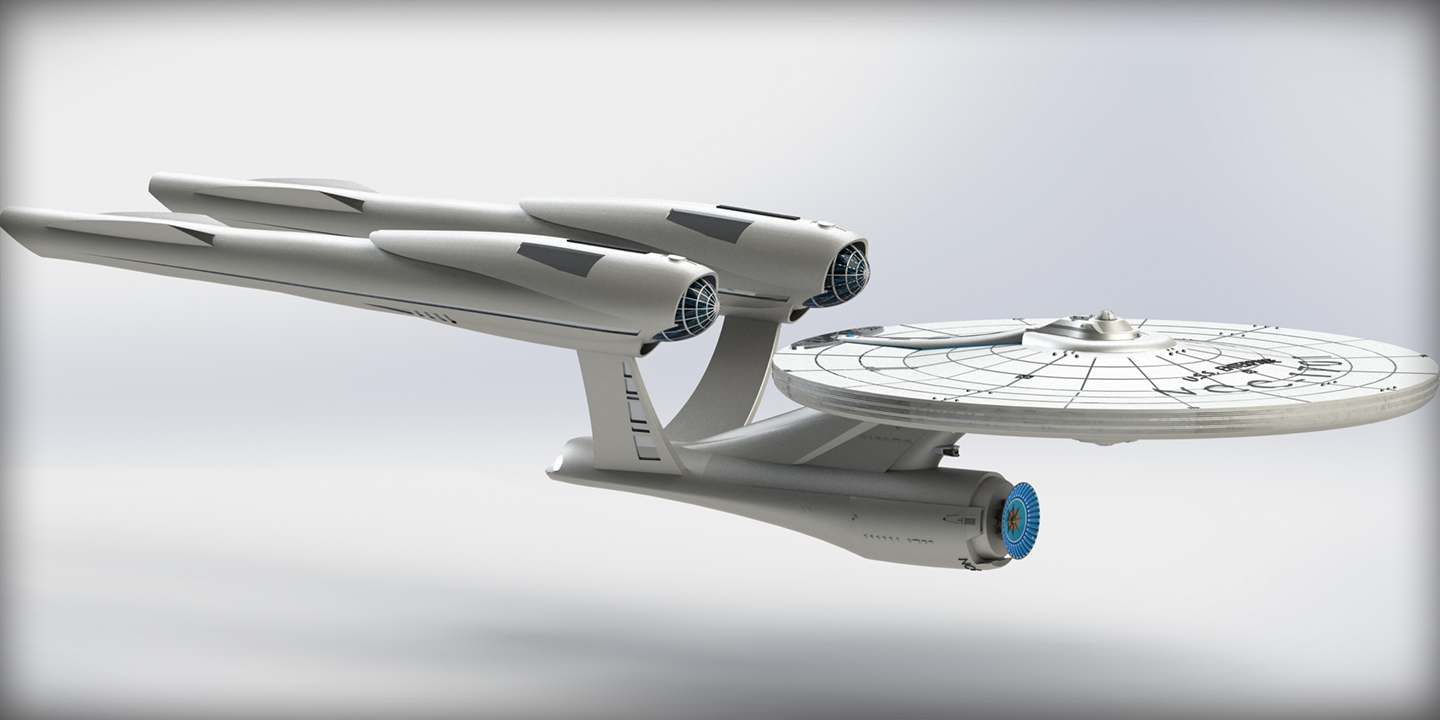
Star Trek Enterprise - Movie Reboot
Personal project to create 3D model of the USS Enterprise from the Star Trek reboot movies. Project relied on SolidWorks lofts and surfaces modeling for complex curved surfaces.
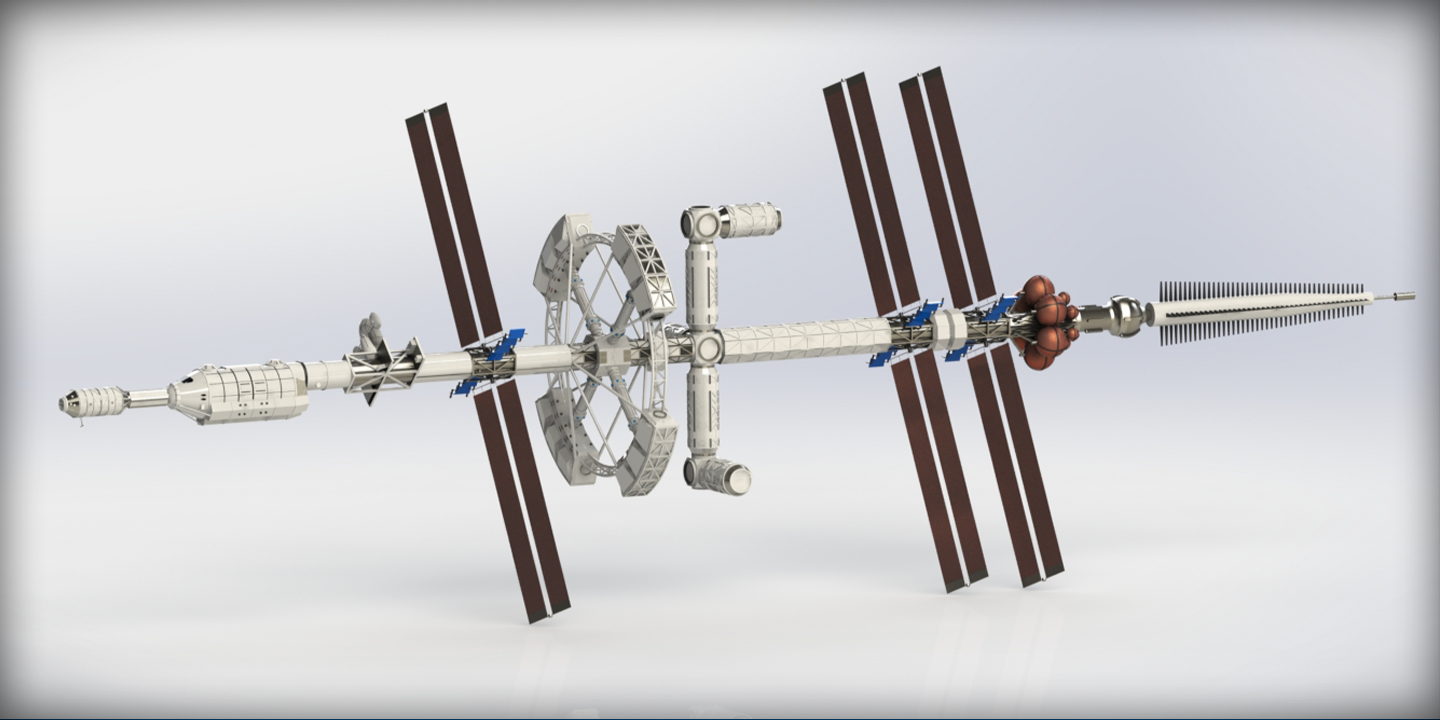
Hermes Spacecraft
Personal project to create a 3D model of the Hermes Spacecraft as seen in the movie, The Martian.